發布日期:2022-08-21 點擊率:46
智能小車是集微處理器技術、傳感技術、信息處理技術等多種技術于一體的綜合系統,目前,智能小車在軍事、民用及科學研究等領域都已得到廣泛的應用。更是受到眾多電子類競賽的青睞,如全國大學生電子競賽、飛思卡爾智能車大賽等;比賽中的思路及創新對實際應用的發展也起著重要作用。
1 系統設計方案
智能小車采用最簡單的三極管開關電路構成電平轉換電路,設計成一款多功能的傳感器模塊。此方案成本低,擴展方便;而且此電路可以用引線連接不同的光電傳感器,將智能車要完成的其它功能結合在一起。
2 原理設計
在小車中應用的傳感器,無論是尋跡、檢測路程還是避障都可以應用紅外線實現。只是應用的傳感器形狀和原理略有不同。尋跡和避障要用反射式。而檢測路程要用直接接收式。我們可以用U形槽狀的光電傳感器。令傳動齒輪通過凹槽,齒輪上開一孔。每當該孔通過槽體,槽體一側發射管的紅外線將無阻擋地射到接收管上,產生一脈沖信號。根據產生信號的次數,還有齒輪一周與車行進路程的關系,便可用程序計算出小車行駛的路程。
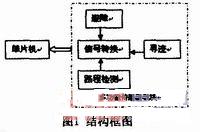
幾種傳感器雖接通方式不同,但它們接收到信號后,都要經過同樣的處理過程。就是把一個變化的不穩的電壓轉換成一相對穩定的電平信號。可把這三種傳感器的處理電路做在同一塊板上,此塊板主要作尋跡模塊,尋跡用的光電傳感器都可布在上面。檢測路程和避障則可留出插針,用杜邦線連接,置于任何位置。功能框圖如圖1所示。
3 電路設計
具體電路設計見圖2.以圖左半部分為例,當TCRT5000下面無黑線時,紅外線能正常反射,接收管可以接收到信號并導通,此時NPN三極管導通,指示燈亮并向單片機提供高電平。反之當光電傳感器下面有黑線時,NPN三極管關斷,單片機得到低電平信號。通過調節102的可調電阻,可以調整發射強度,下面100Ω電阻作為防燒毀的限流電阻。這是一張簡化的原理圖,圖中左半部的電路同樣可以視需要的尋跡器個數擴展任意多個。本設計用五只TRCT5000來尋跡,對應輸給單片機插口的7-3號腳,這樣可分別接避障模塊和路程檢測模塊。
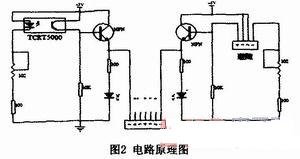
圖3為單面布板參考圖。
4 注意事項
調節可調電阻可以改變發射強度,使得傳感器在一定高度時也可以得到反射信號。曾經試過在某一個高度時有的指示燈亮,有的指示的不亮。由于光電傳感器的個體差異導致這樣的情況是可能的。調節電阻使指示燈發光即可。這樣既可以顯示出當前黑線的位置狀態,又可以在反射面比較差的條件下了解是不是有個別傳感器不起作用。
在使用該模塊的時注意傳感器距離反射面的高度以及光電傳感器的排列樣式。本設計采用一字型。也有采用菱形、M字形的。根據具體賽道加以分析。
反射面的形態對這類傳感器絕對是個大的考驗。曾經有這樣的慘痛經歷:智能車在制作和調試的過程中,都是在地磚上粘上黑色膠帶來完成的,結果測試時場地是白紙粘上膠帶,這樣造成了小車一些傳感器的不適應,導致測試失敗。所以在制作階段就要按組委會標準仿制場地。
5 結束語
智能車在電子競賽中的意義不僅在于它的精彩紛呈,競賽的思路和方案更可以用于生產和生活中。如一些管道機器人、救援機器人、圖書館或辦公室資料自動運送車等。
下一篇: PLC、DCS、FCS三大控
上一篇: 淺談汽車側向傾斜角度

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


