本文介紹了包裝機溫度控制系統(tǒng)的工作原理,以及單神經(jīng)元自適應PID算法的原理,通過對基于單神經(jīng)元自適應PID算法的包裝機溫度控制子系統(tǒng)的調(diào)試,成功將單神經(jīng)元自適應PID溫控算法移植到包裝機控制器中,試驗測試表明用該方法進行參數(shù)整定的控制系統(tǒng),具有很好的自適應性和穩(wěn)定性以及很高的控制精度。
包裝機,是指將具有熱塑特性的塑料復合膜經(jīng)加熱軟化制成包裝容器,在一臺設備上自動完成制袋成型、填充物料、封合剪切等全過程的自動包裝設備。塑料復合膜必須加熱到一定的溫度才能軟化,所以包裝機控制器必須控制加熱設備的溫度在很小的范圍之內(nèi)。雖然現(xiàn)在已經(jīng)有很多專用的溫控模塊,但其價格往往很高,為了節(jié)約成本,本文將溫控算法移植到包裝機控制器中。
以往的溫度控制方式大多是數(shù)字PID控制,數(shù)字PID控制是一種采樣控制,它是根據(jù)采樣時刻的偏差值計算控制量,由于數(shù)字PID控制具有技術(shù)成熟、結(jié)構(gòu)靈活,不需要預先確定被控對象的數(shù)學模型以及控制效果好等優(yōu)點,它廣泛應用于冶金、機電、化工等行業(yè)。但數(shù)字PID控制需要預先整定三個參數(shù),調(diào)試起來比較繁瑣,而神經(jīng)元具有自學習、自適應、結(jié)構(gòu)簡單、計算量小等優(yōu)點,成功應用在很多系統(tǒng)中,故本文將神經(jīng)元和數(shù)字PID的優(yōu)點結(jié)合起來,采用單神經(jīng)元自適應 PID算法,對包裝機溫度控制系統(tǒng)進行在線學習與參數(shù)整定。通過對包裝機溫度控制系統(tǒng)的試驗測試,調(diào)整與分析神經(jīng)元的比例系數(shù)K對控制系統(tǒng)的影響,最后成功將其移植到包裝機控制器。
1 包裝機溫度控制系統(tǒng)工作原理
包裝機工作時,需要將塑料復合膜進行封口,它是通過加熱到一定溫度的2路橫封刀和2路縱封捏紙輪實現(xiàn)的,因此包裝機正常工作的先決條件是溫度控制在很小的范圍內(nèi)。在觸摸屏上設定好加熱溫度以及上下限報警溫度后,通過ModBus通訊協(xié)議與包裝機控制器進行通訊,包裝機控制器接收到設定溫度和上下限報警溫度后,會對封刀或捏紙輪處的K型熱電偶進行溫度采集,通過包裝機控制器的控制作用,使封刀或捏紙輪處的溫度保持在很小的范圍內(nèi),具體是包裝機控制器控制輸出 PWM脈沖信號的占空比(脈沖周期固定),從而控制固態(tài)繼電器的閉合時間。固態(tài)繼電器的導通,會使封刀或捏紙輪處的加熱管接通電源,加熱封刀(固態(tài)繼電器的輸出與加熱管和交流電源相串聯(lián))。固態(tài)繼電器在脈沖周期內(nèi)的導通時間越長,溫度上升越快,當封刀或捏紙輪加熱到設定溫度后,包裝機控制器需要控制固態(tài)繼電器以特定的占空比保證加熱管接通電源,從而使封刀或捏紙輪處的溫度保持在設定溫度附近。包裝機溫度控制系統(tǒng)框圖如圖1所示。
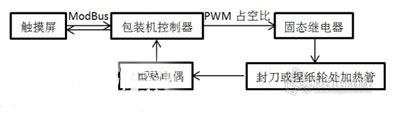
圖1 包裝機溫度控制系統(tǒng)框圖
圖1中的K型熱電偶所測溫度對應的電壓信號,由于是小信號,需要在包裝機控制器中設計放大電路,將小信號電壓放大到A/D轉(zhuǎn)換器能夠分辨的大電壓信號,并對K型熱電偶進行冷端補償。圖2為包裝機PID溫度控制系統(tǒng)方框圖。
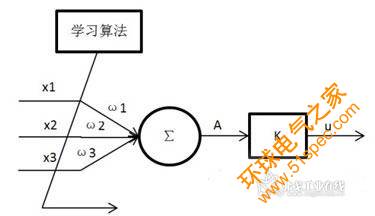
圖2 包裝機PID溫度控制系統(tǒng)方框圖
2 基于單神經(jīng)元的自適應PID控制算法
2.1單神經(jīng)元模型
圖3 單神經(jīng)元模型
單神經(jīng)元的輸出為:

其中,

分別對應神經(jīng)元第i個輸入、第i個輸入所對應的連接權(quán)值,K為神經(jīng)元的增益(比例系數(shù)),它對系統(tǒng)的快速跟蹤和抗干擾能力有較大的影響。神經(jīng)元控制器的輸出為:

2.2 有監(jiān)督的Hebb學習規(guī)則
學習規(guī)則是修正神經(jīng)元之間的連接強度或加權(quán)系數(shù)的算法,使獲得的知識結(jié)構(gòu)適應周圍環(huán)境的變化。單神經(jīng)元控制器的自適應功能是通過學習改變連接權(quán)值來實現(xiàn)的。學習算法就是調(diào)整連接權(quán)值 的規(guī)則,它是單神經(jīng)元控制器的核心,并反映了其學習的能力。
的規(guī)則,它是單神經(jīng)元控制器的核心,并反映了其學習的能力。
將無監(jiān)督的Hebb學習規(guī)則和有監(jiān)督的Delta學習規(guī)則兩者結(jié)合起來,就組成有監(jiān)督的Hebb學習規(guī)則,即:

2.3 單神經(jīng)元自適應PID控制
單神經(jīng)元自適應PID控制器是通過對加權(quán)系數(shù)的調(diào)整來實現(xiàn)自適應、自組織功能,權(quán)系數(shù)的調(diào)整是按有監(jiān)督的Hebb學習規(guī)則實現(xiàn)的。學習算法為:

控制算法為:


由具有自學習和自適應能力的單神經(jīng)元構(gòu)成的自適應PID控制器,不但結(jié)構(gòu)簡單,而且能適應環(huán)境變化,有較強的魯棒性。
3 試驗測試
將單神經(jīng)元自適應PID溫控算法移植到包裝機控制器MC56F8037中,實時在線采集封刀或捏紙輪加熱管處的溫度,并將其發(fā)送到觸摸屏實時顯示。溫度上下限設定為±5℃,如果封刀或捏紙輪處的溫度超出上下限將導致包裝機控制系統(tǒng)的報警,并產(chǎn)生包裝機控制系統(tǒng)的緊急停車,暫停包裝機的正常工作。
神經(jīng)元自適應PID算法的控制量u(k)是MC56F8037PWM模塊輸出脈沖的占空比(PWM配置為Center-Aligned),即
PWM period = (PWM modulus) × (PWM clock period) × 2 (9)
PWM pulse width = (PWM value) × (PWM clock period) × 2 (10)
式(9)為PWM周期計算公式,PWMmodulus由CMOD寄存器決定,本測試設置為32767,則
PWMperiod=65534×(PWMclockperiod) (11)
而PWMvalue的變化范圍為0~32767,即控制量u(k)的變化范圍為0~32767。
比例、積分、微分的自適應學習速率分別設定為0.4、0.5、0.4。當神經(jīng)元的比例系數(shù)K取值較小時,溫度緩慢上升,u(k)在0-32767之間緩慢上升,當溫度達到設定溫度后,u(k)并沒有下降,直到溫度大于設定溫度時,控制量u(k)才下降,由于K取值較小,u(k)變化緩慢,導致溫度超調(diào)過大,因此溫度會在很長時間后才會穩(wěn)定下來;而K取值較大時,由于溫度偏差太大,控制器自適應學習,導致u(k)在0-32767之間反復變化,當占空比較大時,會加熱封刀,而當占空比較小時,就會導致溫度的下降,所以會出現(xiàn)溫度在升降中上升。
為了提高溫度的上升速度,加快整定過程,神經(jīng)元的比例系數(shù)K取為10。采用在溫度低于140℃時,PWM的占空比控制在90%以上,以加快系統(tǒng)的穩(wěn)定速度,當溫度大于140℃并且小于160℃時,PWM的占空比控制在10%到90%之間,以使神經(jīng)元自適應在線學習和整定PID參數(shù),當溫度大于160℃ 時,PWM占空比控制在0到10%,從而實現(xiàn)PID參數(shù)的快速整定。圖4是單通道溫控子系統(tǒng)的測試結(jié)果。包裝機控制器的速度已經(jīng)很快,所以四路溫控連續(xù)整定沒有問題,但為了提高控制器的實時性,采用控制器每次循環(huán)只整定1路,四次循環(huán)就把四路都整定一遍,每隔1s同時改變四路的PWM占空比值,可以有效的提高PWM模塊的效率。因為當每次循環(huán)改變PWM值時,u(k)使得PWM值變化很快,固態(tài)繼電器的導通時間一直在變,會使加熱管的加熱效率變低。
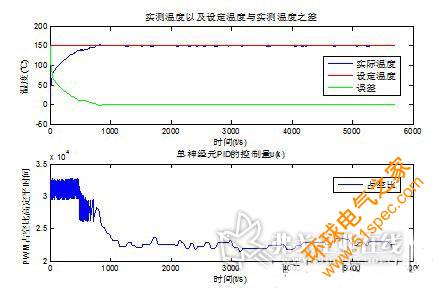
圖4 單通道溫控子系統(tǒng)的測試結(jié)果
圖4表明誤差能夠控制在±1℃,這是由控制器對K型熱電偶的電壓采集模塊ADC的精度以及PWM占空比分辨率決定的,如果溫度采集精度達到0.1℃并且增大PWM占空比的范圍,理論上講,誤差能夠控制在±0.1℃。
4 結(jié)論
本文實現(xiàn)了單神經(jīng)元自適應PID算法在包裝機溫度控制子系統(tǒng)中的應用,并成功將其移植到包裝機控制系統(tǒng)中,從控制效果來看,溫度能夠保持在149℃~151℃,沒有超出設定的上下限溫度范圍,從而有效提高包裝機的控制性能,為包裝機的正常工作提供保障。
參考文獻:
[1]于鐳,常軍,黃存柱.基于DSP的自動包裝機控制系統(tǒng)的軟件設計[J].微型機與應用,2010(1):3~5.
[2]羊彥,景占榮,畢強等.無刷直流電動機數(shù)字PID控制的研究[J].電機與控制學報,2003,7(4):299~302.
[3]馬小霞,戴世榮,李漢舟等.陀螺數(shù)字PID溫度控制系統(tǒng)設計與實現(xiàn)[J].中國慣性技術(shù)學報,2004,12(1):66~69.
[4]孫亮,孫啟兵.神經(jīng)元PID控制器在兩輪機器人控制中的應用[J].控制工程,2011,18(1):113~115.
[5]劉忠,李偉,彭金艷等.位置伺服系統(tǒng)的單神經(jīng)元PID/CMAC控制研究[J].計算機工程與應用,2008,44(7):220~222.
[6]嚴駿,黎波,郭剛等.基于單神經(jīng)元PID的挖掘機鏟斗位姿自適應控制[J].解放軍理工大學學報:自然科學版,2012,13(3):316~319.
[7]JoseR.NoriegaHW.ADirectAdaptiveNeural- networkControlforUnknownNonlinearSystemsandItsApplication[J].IEEETransactionsonNeural- network,1998,19(1):33~37.
[8]丁軍,徐用懋.單神經(jīng)元自適應PID控制器及其應用[J].控制工程,2004,11(1):27~30.
[9]王旭光,孫衢.基于RBF辨識的單神經(jīng)元PID調(diào)速器設計[J].自動化技術(shù)與應用,2008,27(6):57~60.
[10]張建民,王濤,王忠禮.智能控制原理及應用[M].北京:冶金工業(yè)出版社,2003:131~132.
[11]張建明,王寧,王樹青.PID自適應調(diào)整增益的神經(jīng)元非模型控制[J].機電工程,1999,16(5):72~73.
[12]MicrocontrollerSolutionsGroup.56F802Xand56F803XPeripheralReferenceManualRev.3.1[Z].USA:FreescaleSemiconductor,2012:8-5~8-7.
<


