發布日期:2022-10-09 點擊率:63 品牌:安川_Yaskawa
一、問題現狀:
福建省某印染公司因復合涂布機設備使用年限已久,導致電控柜內部一些工控產品(變頻器:艾默生UNI1404)損壞,直接影響設備停機,無法生產產品。因該變頻器是十幾年前的產品,已停產且配件亦無處購買,故無法修復,需進行改造。
二、改造方案:
為使該設備恢復正常生產,制定方案如下:
對該設備電控柜內變頻器進行更換改造,更換產品為安川A1000系列變頻器。通過與PLC、人機界面通信,實現啟停控制、參數設定、狀況監控、異常報警等功能。
三、改造要求:
1、主電機和復合電機需同步控制;
2、放卷電機和收卷電機做張力控制;
3、各變頻器與PLC之間實現通信功能。
四、改造配置:
序號 | 參數 | 主電機 | 復合電機 |
1 | 電機 | 7.5KW/4極 | 4.0KW/4極 |
2 | LMA-250BM-C05D | LMA-250BM-C05D | |
3 | 變頻器 | CIMR-AB4A0023AAA(7.5KW) | CIMR-AB4A0018AAA(5.5KW) |
4 | PG卡 | PG-X3 | PG-X3 |
序號 | 參數 | 放卷電機 | 收卷電機 |
1 | 電機 | 2.2KW/4極 | 2.2KW/4極 |
2 | LMA-250BM-C05D | LMA-250BM-C05D | |
3 | 變頻器 | CIMR-AB4A0007AAA(2.2KW) | CIMR-AB4A0007AAA(2.2KW) |
4 | PG卡 | PG-X3 | PG-X3 |
五、改造過程:
1、選型:
根據原電機、編碼器、變頻器和PG卡的型號、接線方式及相關參數,選擇安川相應的變頻器(A1000)和PG卡(PG-X3)。
2、拆卸:
記錄并標識各變頻器的接線作用,按順序拆下變頻器。
3、安裝:
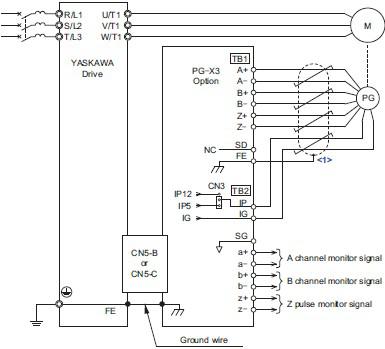
安裝并固定好各變頻器,并將PG-X3裝入變頻器CN5-C插口。
4、接線:
4.1 變頻器控制回路接線

4.2 PG卡接線(編碼器電源為DC5V)
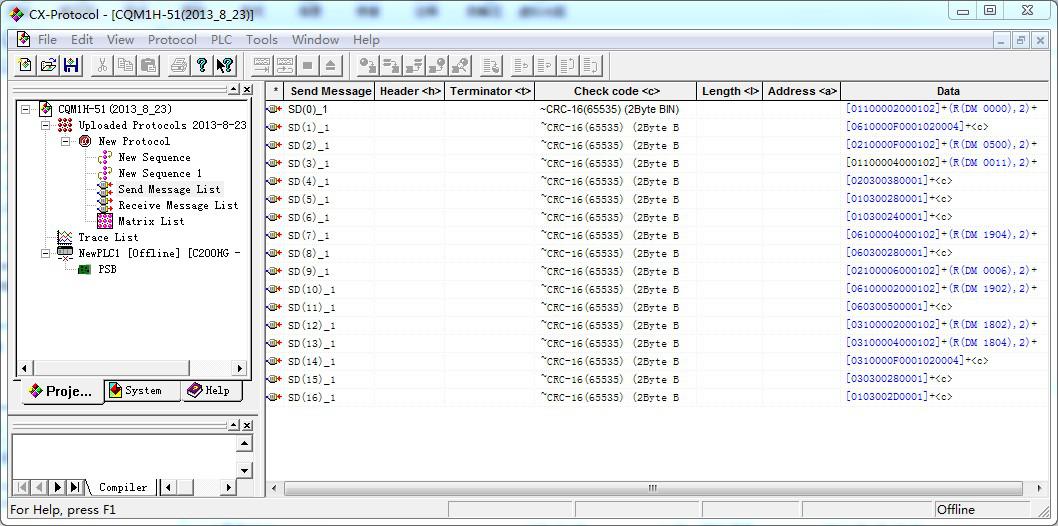
4.3 RS485通信接線(2-wire 1:N)

5、調試步驟:
5.1 上電前檢查變頻器接線是否正確,編碼器接線是否對應。

5.2 確認電機是否脫離減速機,做電機自學習功能,選擇控制模式A1-02=3(帶PG矢量控制),進入變頻器菜單![]() 模式后顯示:T1-01=0(旋轉型自學習),T1-02~T1-08按電機參數和編碼器參數進行設置。輸入電機銘牌值后,變頻器最后提示:
模式后顯示:T1-01=0(旋轉型自學習),T1-02~T1-08按電機參數和編碼器參數進行設置。輸入電機銘牌值后,變頻器最后提示: ,按
,按![]() 運行自學習開始。若接上編碼器做自學習后,變頻器報電機方向故障,此時可以將參數F1-05更改為1(B 相超前)。自學習結束后變頻器顯示自學習完畢
運行自學習開始。若接上編碼器做自學習后,變頻器報電機方向故障,此時可以將參數F1-05更改為1(B 相超前)。自學習結束后變頻器顯示自學習完畢![]() 。可以看到E2(電機1的設定參數)電機參數和以前有變化,說明自學習成功。
。可以看到E2(電機1的設定參數)電機參數和以前有變化,說明自學習成功。
5.3 自學習結束后,接上負載運行變頻器看U1-01(頻率指令)與U1-02(輸出頻率)是否正常,包括電機方向信號。
5.4 主電機和復合電機做速度控制(d5-01=0時),確認正反轉是否正常。同時注意監視參數U1各參數是否正常。如果速度控制時不正常,檢查編碼器和相關參數設置是否正確。
5.5 放卷電機和收卷電機做轉矩控制(d5-01=1時),設定端子A1功能選擇為轉矩指令/速度限制時轉矩極限(H3-06=13時)。如果出現電機只有正轉無反轉,反轉時無信號反饋不正常(U1-02不等于U1-01),此時可以將電機轉矩極性取反。具體做法:①將參數外部轉矩指令的極性反轉指令(H1-07=78時);②變頻器多段速接線S2、S7,短接后引出一根線接開關,SC引出一根線接開關另一端,當變頻器正轉運行時開關斷開,當變頻器需要反轉時開關閉合。變頻器運行時可以監視參數U1-09轉矩指令是否在正常范圍。
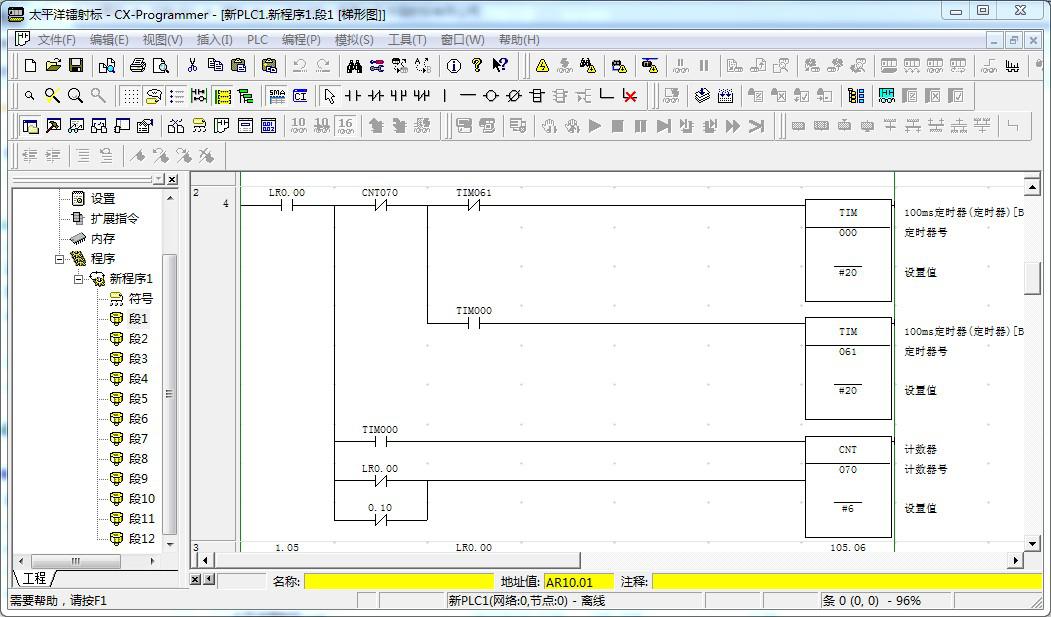
6、對PLC和人機界面程序修改,控制變頻器運轉及與變頻器通信。實現啟停控制、參數設定、狀況監控、異常報警等功能。

7、開機試運行及調試,實現多臺電機同步及張力需要。
用變頻器做恒定張力控制的實質是閉環矢量控制,即加編碼器反饋。對收卷來說,收卷的卷徑是由小到大變化的,為了保證恒定張力,所以要求電機的輸出轉矩要由小到大變化。同時在不同的操作過程,要進行相應的轉矩補償。即小卷啟動的瞬間、加速、減速、停車,大卷啟動時,要在不同卷徑時進行不同的轉矩補償(H3-06=14時),這樣就能使得收卷的整個過程很穩定,避免小卷時張力過大,大卷啟動時松紗的現象。
8、產品投入加工,達到改造目的。


放卷 收卷
福建省某印染公司,應用我司A1000型變頻器對該廠復合涂布設備進行改造,經過技術改造以后,工藝可控性和產品合格率明顯改善,生產效率和能源利用得到提高,取得了可觀的經濟效益。
六、參數設定:
序號 | 參數 | 名稱 | 主電機 | 復合電機 | 放卷電機 | 收卷電機 |
1 | A1-02 | 控制模式選擇 | 03:帶PG矢量控制 | 03:帶PG矢量控制 | 03:帶PG矢量控制 | 03:帶PG矢量控制 |
2 | b1-01 | 頻率指令選擇 | 02:MEMOBUS通信 | 02:MEMOBUS通信 | 02:MEMOBUS通信 | 02:MEMOBUS通信 |
3 | b1-02 | 運行指令選擇 | 01:控制回路端子(順控輸入) | 01:控制回路端子(順控輸入) | 01:控制回路端子(順控輸入) | 01:控制回路端子(順控輸入) |
4 | b5-01 | PID控制的選擇 | 0:PID控制無效 | 3:PID控制有效(頻率指令+PID輸出,對偏差進行D控制) | 1:PID控制有效(對偏差進行D控制) | 1:PID控制有效(對偏差進行D控制) |
5 | b5-02 | 比例增益(P) | 出廠值 | 1.20 | 3.00 | 1.00 |
6 | b5-03 | 積分時間(I) | 出廠值 | 8.0 | 1.5 | 5.0 |
7 | b5-05 | 微分時間(D) | 出廠值 | 0.00 | 0.00 | 0.00 |
8 | b5-06 | PID的上限值 | 出廠值 | 1.2 | 100.0 | 20.0 |
9 | b5-09 | PID輸出的特性選擇 | 0:PID的輸出為正特性 | 1:PID的輸出為反特性(使輸出符號取反) | 0:PID的輸出為正特性 | 1:PID的輸出為反特性(使輸出符號取反) |
10 | C1-01 | 加速時間1 | 150.0 | 40.0 | 80.0 | 10.0 |
11 | C1-02 | 減速時間1 | 50.0 | 30.0 | 80.0 | 10.0 |
12 | d1-01 | 頻率指令1 | 0.70 | 2.00 | ||
13 | d5-01 | 轉矩控制選擇 | 0:速度控制 | 0:速度控制 | 1:轉矩控制 | 1:轉矩控制 |
14 | d5-03 | 速度極限選擇 | 1:通過b1-01(頻率指令選擇1)的設定值進行限制 | 1:通過b1-01(頻率指令選擇1)的設定值進行限制 | 2:通過d5-04(速度極限)的設定值進行限制 | 2:通過d5-04(速度極限)的設定值進行限制 |
15 | d5-04 | 速度極限 | 0 | 0 | 85 | 100 |
16 | d5-05 | 速度極限偏置 | 10 | 10 | 90 | 100 |
17 | E2-01 | 電機額定電流 | 15.41 | 5.77 | 5.00 | 5.00 |
18 | E2-02 | 電機額定滑差 | 4.38 | 3.78 | 2.10 | 2.00 |
19 | E2-03 | 電機的空載電流 | 1.97 | 1.89 | 1.78 | 1.78 |
20 | E2-04 | 電機的極數 | 4 | 4 | 4 | 4 |
21 | E2-05 | 電機線間電阻 | 3.570 | 7.812 | 5.178 | 5.324 |
22 | E2-06 | 電機漏電感 | 40.0 | 32.2 | 16.9 | 16.8 |
23 | E2-11 | 電機額定容量 | 7.50 | 4.00 | 2.20 | 2.20 |
24 | F1-01 | PG1的脈沖數 | 2500 | 2500 | 2500 | 2500 |
25 | F1-05 | PG1旋轉方向設定 | 0:電機正轉時,A相超前 | 0:電機正轉時,A相超前 | 0:電機正轉時,A相超前 | 0:電機正轉時,A相超前 |
26 | F1-06 | PG1的輸出分頻比 | 1 | 1 | 1 | 1 |
27 | H1-01 | 端子S1的功能選擇 | 0040:正轉運行指令 | 0040:正轉運行指令 | 0040:正轉運行指令 | 0040:正轉運行指令 |
28 | H1-02 | 端子S2的功能選擇 | 0041:反轉運行指令 | 0041:反轉運行指令 | 0041:反轉運行指令 | 0041:反轉運行指令 |
29 | H1-07 | 端子S7的功能選擇 | 出廠值 | 出廠值 | 0078:外部轉矩指令的極性反轉指令 | 0078:外部轉矩指令的極性反轉指令 |
30 | H2-01 | 端子M1-M2的功能選擇(接點) | 出廠值 | 0001:輸出頻率不高于E1-09(最低輸出頻率) | 出廠值 | 出廠值 |
31 | H3-02 | 端子A1功能選擇 | 000B:PID反饋 | 出廠值 | 13:轉矩指令/速度限制時轉矩極限 | 13:轉矩指令/速度限制時轉矩極限 |
32 | H3-03 | 端子A1輸入增益 | -5.0 | 107.0 | 出廠值 | 出廠值 |
33 | H3-06 | 端子A3功能選擇 | 出廠值 | 000B:PID反饋 | 14:轉矩補償 | 14:轉矩補償 |
34 | H3-07 | 端子A3輸入增益 | 出廠值 | 出廠值 | -20.0 | -1.0 |
35 | H4-01 | 端子FM監視選擇 | 105:顯示檢出的電機速度 | 出廠值 | 出廠值 | 出廠值 |
36 | H4-04 | 端子AM監視選擇 | 109:顯示矢量控制時的內部轉矩指令值 | 103:顯示輸出電流 | 113:顯示端子A1的電壓 | 103:顯示輸出電流 |
37 | H4-05 | 端子AM監視增益 | 出廠值 | 100.0 | 121.0 | 出廠值 |
38 | H4-06 | 端子AM監視偏置 | 出廠值 | 7.0 | 出廠值 | 出廠值 |
39 | H5-01 | 從站地址 | 0001 | 0002 | 0003 | 0006 |
40 | H5-02 | 通信速度的選擇 | 3:9600bps | 3:9600bps | 3:9600bps | 3:9600bps |
41 | H5-03 | 通信校驗的選擇 | 1:偶數校驗 | 1:偶數校驗 | 1:偶數校驗 | 1:偶數校驗 |
具體詳見附件
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV

型號:109P0424HTD28
價格:面議
庫存:1000
訂貨號:109P0424HTD28

型號:FV-06035-BA
價格:面議
庫存:999
訂貨號:

型號:80TN0560C13
價格:面議
庫存:999
訂貨號:

型號:R2E190-A026-44
價格:面議
庫存:500
訂貨號:

型號:6550KG1-31
價格:面議
庫存:999
訂貨號:

型號:dkhr500-4sw.155.6hf
價格:面議
庫存:999
訂貨號:


