
發布日期:2022-07-14 點擊率:50
隨著電機及其應用的演進,需要用來驅動電機的驅動電路也在得到不斷的演進。特別是,汽車電子設計師實現了分布式的處理策略,其中,他們向電機的周邊電路注入了日益增加的智能。這種控制方案自身也在滲入更多的通用領域,使得典型的電機/驅動組合更類似于一個機電分系統,而不再僅僅是一個簡單的執行器。
如今,設計師在構建一個步進電機驅動電路的架構時有3個基本選擇。傳統的方案是采用一個通用的微處理器或DSP,配之于模擬驅動電路和基于傳感器的反饋回路。但是,日益增加的成本、上市時間和復雜度等方面的壓力,使得工程師正在轉入使用專為電機控制設計的應用特定產品(ASSP)。這樣的方案本身有兩類:即單芯片或雙芯片解決方案。
盡管傳統的微處理器方案正在逐步被ASSP所取代,為了理解這類設計中的典型的設計約束和需求,首先還是應該了解一下這類方案的基礎架構。這種情況中,其程序代碼通常存在閃存中的內核控制器提供一個PWM信號來驅動電機繞組。模擬電路對該信號進行放大來驅動功率級,而功率級則驅動電機繞組。
為了計算出正確的PWM輸出,微控制器需要從外部獲取所需的大量信息。特別是,它需要對電機定位進行反饋。該功能通常由一個霍爾傳感器來實現,該傳感器不僅提供定位信息,還傳感電機轉子的停頓和死鎖(阻塞)。在非常簡單的情況下,可以使用一個簡單的端環路定位開關來代替霍爾傳感器。另外一種方法是使用光學位置編碼,或者是使用一個安裝在電機軸上的阻性電位器。
除了定位數據外,控制器還需要有關電機電流方面的信息。這一信息是經過一個與電機驅動器相串聯的一只電阻傳感出來的,提取出來的數據經過QDC變換后作為控制器自身的輸入。ASSP方案將絕大部分上述功能集成到了一個或兩個器件中,在處理過程中用的是無傳感控制方案。像AMIS-30624(圖1)這類的控制器/驅動器一體的解決方案,提供了最高的集成度,它將控制器、速度、位置電流、故障診斷和功率級全部集成到一個芯片中。盡管這樣的全集成解決方案提供了最小的系統體積和最低的建構成本,但為了其他功能,許多工程師還是喜歡選其作為中間級,而將內核控制器保留在一個像AMIS-30522(圖2)這樣的智能驅動器芯片上。
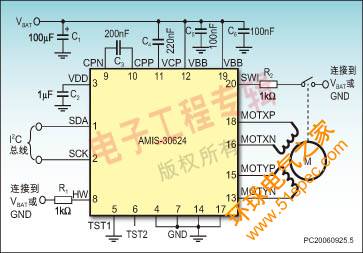
圖1:集控制器和驅動器于一體的解決方案。
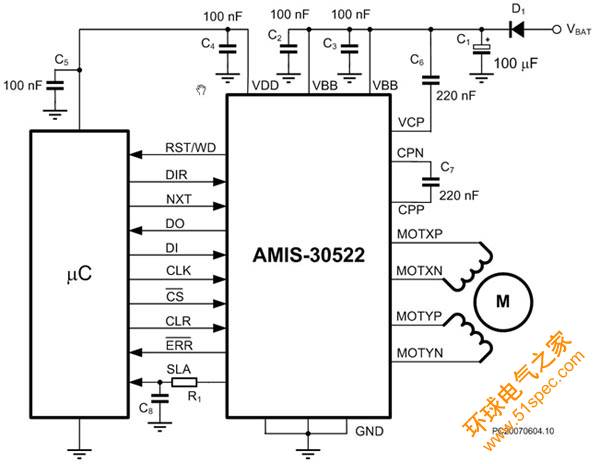
圖2:將內核控制器保留在AMIS-3052這類的智能驅動器芯片上。
采用這種雙芯片方案的動機是兩方面的。其一是,某些應用需要比單芯片所能提供的更大的驅動電流。不過更多的情況是,設計師選用雙芯片解決方案的原因是為了更大可能地發揮其現有IP的價值。他們或許已經利用更喜歡使用的標準微控制器或DSP,開發出了高級的專用軟件。這是非常自然的事情,他們希望復用或者改善已有的資源。
上述的智能集成電機驅動芯片是為下類用戶設計的。應用中只需微控制器提供一個下一步微步進指令作為輸入,并提供電機繞組所需的PWM信號。BOM清單大大地減少了,微控制器的載荷也減到了最小,甚至利用一個微控制器都可以控制多個電機。
采用一片上述的集成驅動器可以根據具體需要,使主控制器功能變得非常簡單或非常復雜。驅動器可以直接實現微步進,減小了噪音和因諧振產生的步進損耗,同時改進了低速時的力矩。由于集成了電流轉換表并整合了一個用于可靠的電流控制的專用PWM算法,進而使處理負荷從主控制器上進一步卸載。
通過I/O和一個簡單的SPI連接,可以對許多參數進行控制,包括電流幅度,步進模式,PWM頻率,EMC斜率控制,以及睡眠模式。該驅動器還可以用來為控制器提供(也是通過SPI)所需要的有關速度、位置、繞組電流以及像開路、短路或過熱這類的故障診斷相關的所有信息。但就像已經看到的一樣,進一步集成是可能的。例如在AMIS-30624中,集成了智能驅動器的所有功能,其中還加入了一個可編程的狀態機,該狀態機將目標位置轉換成按規定的加速度,速度或減速到達某位置所需的(微)步進序列。目標位置和其他高級信息有遠程主機下達,通過I2C或LIN.這類的總線接口進行通信。這樣的架構由一個特殊的優點,即能夠很好地按比例調節多個軸向的運動:硬件和軟件可以按模塊方式擴展,而總線通信本來就可以升級。
為了進一步簡化硬件設計,利用集成控制器能夠大大簡化電機控制算法的開發和實現。實際上,這通常歸功于運行了一個返回所需參數設置的描述算法。
上面研究了如何按照一個定義的序列來不失步地驅動電機,通常由用來確定所需電機電流的系統要求來確定力矩和速度。下一步就需要考慮電機的動態問題。其中最值得注意的是諧振頻率或需要禁止的頻率。在加速和減速過程中都必須盡快地穿越該頻率。在AMIS-30624中,允許將速度配置為“最低”和“正常”速度,還可以配置加速和減速時間,從而使電機實現正確的運動軌跡。所有相關的參數一旦被計算出來,就會通過I2C總線發送到器件。這些參數可以被反復迭代訓練,以證明其可靠性,最后在作為操作數據燒寫到非易失性存儲器(NVM)中。
除了減少BOM清單并簡化設計外,用于步進電機的ASSP方案還能夠實現比較復雜的控制策略和更貼合應用需求的設計。實現這一目標的兩項關鍵技術就是無傳感延遲檢測和動態力矩調節。
步進電機通常用在開環系統中。盡管根據定義可以說這類系統既簡單又穩定,但它有一個缺點,就是缺乏絕對位置反饋。如果電機被鎖住了,這將是危險的,因為驅動器/定位器認為電機還在運轉,因此將繼續驅動繞組。這將產生噪聲,更重要的是,這將切斷了電機的實際位置和定位器中所存信息之間的關聯。
不過,AMIS 30522和AMIS-30624這類器件通過回傳電機繞組通過電機內的磁場時所產生的EMF(BEMF)信號,可以檢測電機的死鎖。BEMF的檢測原理是,就像磁場中的載流導體將會受到一個作用力(引起導體運動),這樣的導體通過一個磁場時將有產生一個EMF抗力。EMF力的大小與電機的速度呈線性關系。最為重要的依據是,當電機鎖住時,該值將為零。
與絕大多數特征和功能的實現一樣,具體的實現取決于所選的驅動器架構。當選用像AMIS-30522這樣的智能驅動器時,可以從一個外部引腳上得到BEMF電壓,然后將其送回微控制器。而集成度最高的器件,像AMIS-30624,在內部嵌有檢測電路,只需通過一個簡單的I2C指令來設定檢測門限電平。
該BEMF還可以用來實現動態力矩調節,這樣潛在地意味著可以減小電機的體積和成本,還改進了能量效率。
BENF是電機速度的時變函數。繞組中BEMF電壓和電流的相位差受電機軸上的機械負載大小的影響:負載增加時,相位差也增大。因此,如果總在相同的時間采樣的話,采出來的BEMF電平將隨著負載的增加而減小,這種現象就是眾所周知的負載角(功角)。
在AMIS-30522上,可以從一個外部引腳上觀察負載角的變化。增加機械負載時-反映出來的是電壓降低-可以通過選擇一個大電流來補償,最終使電機的力矩增加。這樣的動態調節技術意味著設計師不再需要在一開始時就根據所預期的峰值負載來考慮系統在“最壞情況”下應具備的馬力。而是可以選用小一些的,因而也比較便宜的電機。
集成電機控制ASSP減輕了步進電機系統的設計任務-強化了目前的趨勢,即利用這樣的電機來執行日益增多的各種不同應用。除了減少了BOM清單,簡化了設計,縮短了上市時間,還使得工程師可以將主要精力放在增值設計上,而不是放在如何實現低級的控制上,另外,還可以實現更復雜的控制策略,同時還豐富了功能集。
作者:Guido Remmerie
工業產品經理
Peter Cox
工程市場經理
AMI半導體


